Our Technology
Our journey began with a bold vision—sailing buoys that could effortlessly position themselves on the water, much like flying drones, and remain in place. What initially seemed simple soon proved to be a significant challenge.
However, through perseverance, innovative solutions, flexible thinking, and a deep passion for our work, we successfully brought this vision to life—creating the SmartPro buoy
Shape and Construction
Shape and Construction

Shape of the Underwater Hull

Weight and Ballast
Weight, ballast, and the resulting center of gravity are key factors in ensuring the buoy’s stability.
This stability is essential for maintaining the visual body's optimal height and surface area. The SmartPro buoy operates reliably in winds of up to 35 knots, and waves pose no limitation to its functionality. For the buoy, a wave is simply an incline on one side and a descent on the other.
The buoy’s mass also plays a critical role in maintaining precise positioning. To hold its position accurately, it must remain steady, avoiding sudden or erratic movements caused by external forces such as wind or waves. Since the propeller’s thrust is not instantaneous and requires about half a second for the generated water pressure to fully translate into force, the buoy’s weight and inertia are crucial. This mass inertia ensures a smoother, more stable response, effectively compensating for the propulsion system’s physical reaction time.

Visible Shape

Construction
Our buoy's design follows the proven structure of RIB boats, ensuring both stability and durability. The GRP hull provides a secure compartment for the battery and electronics, keeping them well protected.
Additionally, the design allows for easy hull repairs by any regional boat builder in the event of damage.
Battery and Drive Concept
Battery and Drive Concept

Battery
The battery is, in many ways, the heart of the buoy. It determines the buoy's operating time and is one of the most costly components. Additionally, the battery’s lifespan is a crucial factor from both an ecological and financial perspective. We design and manufacture our own battery and associated battery management system to ensure quality and performance.
The battery capacity is designed to allow the buoy to operate for up to two days. Thanks to its high capacity, we can guarantee that even with some degradation over time, the battery will still provide enough power for a full day of use. This approach is sustainable, as it extends the battery's lifespan and helps our customers avoid the costly need for a battery replacement after just a few years.
Read more about batteries here

Drive Concept
This drive concept allows for immediate steering movements. In contrast, drive systems that steer by adjusting the engine or a rudder blade require time for the corresponding component to turn, which results in delayed steering responses. This delay directly affects the buoy's precision and accuracy.
Software and Hardware
Software and Hardware
Software
We developed the software architecture ourselves, from the front-end user interface to the control of the motors. We planned and built the entire software in-house. In addition to the usual priorities such as user-friendliness, stable functionality, and openness to future extensions, the main focus of the software architecture was on comprehensive remote maintenance. Our goal was to ensure that, regardless of the product generation, every software update would function seamlessly and that the latest version would always be automatically applied.
This approach ensures that buoys from different production cycles remain fully compatible with one another. For instance, a buoy from the first year of production (2020) runs the same software as a buoy that leaves our production today. The robust design, the longevity-focused battery, and all other efforts in the design and construction of our buoys to make them long-lasting and sustainable would be meaningless if parts of the buoy had to be replaced because the software became outdated or older buoys became incompatible with newer ones.
Our requirement is simple: no matter how old a buoy is, it must always run the latest software version. This guarantees that our customers can seamlessly integrate new buoys into their system at any time. It also ensures that customers can expand their buoy system for a larger event, using rental or borrowed buoys.
We can only offer this guarantee because we design the entire software architecture ourselves and program everything from the first line of code to the last. Using third-party software from libraries or manufacturers would undermine this requirement. For example, the motor controllers we use are supplied with firmware (functional software) from the manufacturer. However, we cannot use this firmware, as it would create compatibility issues if the manufacturer changes their firmware or if we switch to a different motor controller supplier. By developing and producing our own software from start to finish, we ensure that we can offer these critical advantages to our customers.
Hardware
No ready-made circuit boards meet our needs: There are no off-the-shelf circuit boards that suit our intended use. While it is possible to combine circuit boards from different areas, this would mean that, due to modifications to purchased boards, they could no longer operate with the same software. This would prevent us from meeting our requirement that all product generations must always run the same software.
Control over architecture, components, and quality: By developing our own circuit boards, we can precisely define the architecture, components, and quality required for our products. With ready-made circuit boards, we would be limited to those that are closest to our needs, leading to compromises. These compromises would result in hardware limitations, which would, in turn, create software compromises. Over time, these compromises would become problematic.
Sustainable design and modularity: Our circuit boards are designed with sustainability in mind. We have invested significant time, energy, and innovation to ensure they are durable and compatible. Instead of using integrated, all-in-one circuit boards, we have chosen a more complex, modular approach, using individual boards for specific areas. These modules do not communicate directly with each other but do so via interfaces. While this approach is more expensive in terms of development, software, production, and the final sales price compared to using a single, all-in-one board, it is a worthwhile investment. The modular design ensures longevity and flexibility over the buoy’s lifespan. Thanks to this design, we can guarantee the following:
Future-proof components: Even in 10 years, when components such as motor controllers, CPUs, LTE modems, etc., are no longer relevant or available, these parts can be individually replaced or upgraded. Even if communication methods change in ways we cannot predict today, the modular interfaces will ensure compatibility.
Simplified repairs: In the event of a defect or damage, only the circuit board in the affected area needs to be replaced, rather than the entire system.
Adaptability to future technology and requirements: Technology evolves quickly, and the requirements for our buoys may change just as rapidly. Even within a 5-year timeframe, it is impossible to predict exactly what new technologies or requirements may arise. Thanks to our modular design, we can easily integrate technological advances by replacing or adding modules as needed, ensuring our buoys remain adaptable to the future.
Positioning, Sensors, Accuracy
Positioning, Sensors, Accuracy

Positioning, Sensors, Accuracy
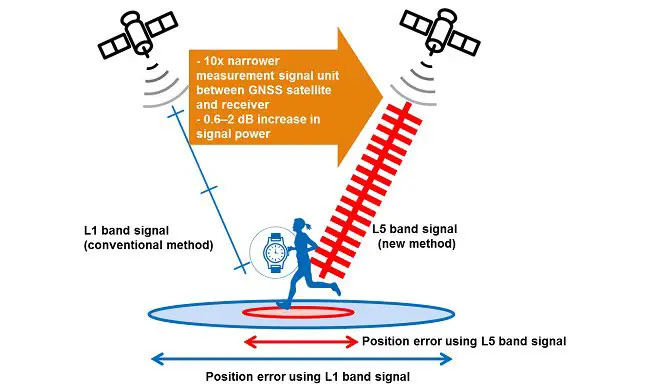
GNSS (GPS) Navigation
Inertial Navigation
Inertial navigation is based on multiple sensors such as gyroscopes and barometers. Based on the values determined by the sensors, the system calculates the direction of movement as well as the speed of movement, from which the position is calculated. In addition to determining the position, the sensors provide us with data on the pitch and tilt angles as well as acceleration values (G-value).

How does our positioning system work
Our navigation (positioning) uses the data from GNSS (GPS) navigation and inertial navigation simultaneously. Neither GNSS (GPS) navigation nor inertial navigation are individually able to determine the position with sufficient accuracy for buoy systems. The combination of the two systems creates not only precision but also stability in the positioning, which positions our buoys 100% accurately and stably.
UHF-Based Backup Communication System

UHF backup communication is a radio-based system that ensures continuous data transmission from the buoy, even when GSM coverage is lost or blocked. With increasing use of signal-jamming technologies — especially in high-security areas — GSM disruptions are becoming more frequent.
To maintain reliability in all conditions, our buoys now feature automatic switching to UHF. No user action is needed — the system monitors the GSM signal and activates the backup channel when required.
Read more about UHF communication system here
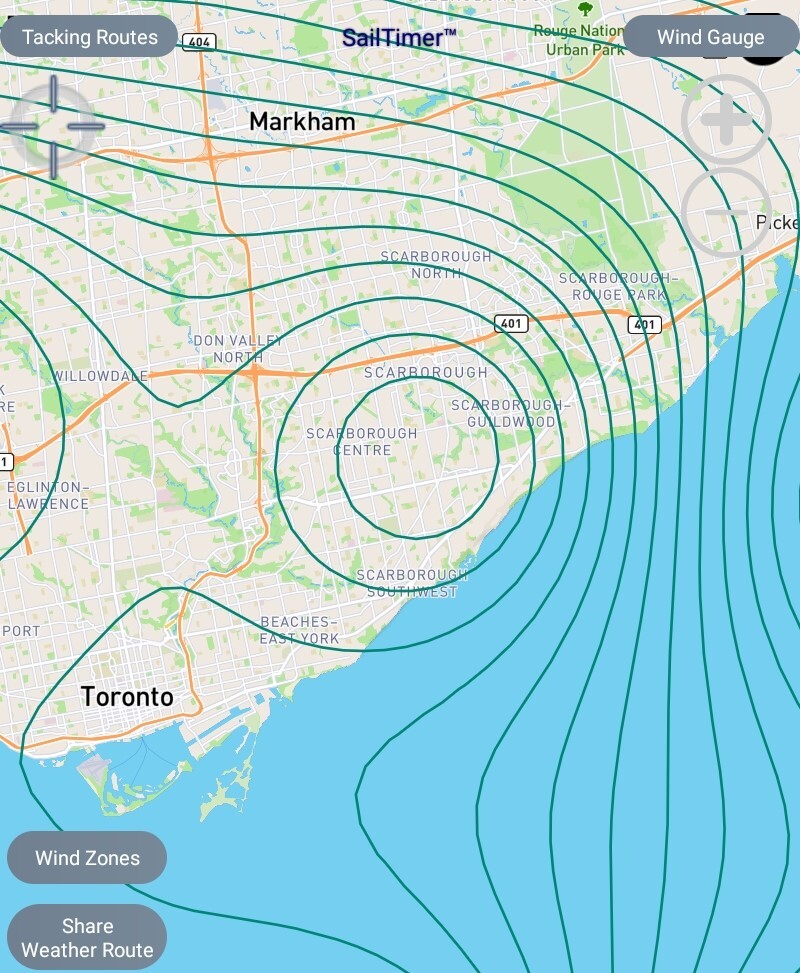
Advanced Wind Sensor – Real-Time Wind Tracking from the Water
Our advanced wind sensor delivers precise, real-time measurements of wind speed and direction directly from buoy locations. Designed for reliability and ease of use, it’s an ideal tool for sailors, kiteboarders, and outdoor enthusiasts who depend on accurate wind data.
With satellite imaging integration, the system enhances local readings with a broader wind overview — creating a detailed and dynamic wind map.
Real-time data is easily accessible via your smartphone, keeping you informed and connected wherever you are on the water.
Stay ahead of changing conditions with wind measurements at your fingertips.